JFCS – FA搬送システム | 3次元搬送装置メーカー
製品情報
企業情報
お知らせ / Q&A
海外拠点
PRODUCT
FCS-H300/H200
自由なレイアウトで
高速・強制・3次元搬送を実現
FA立体空間を走るハンドリングロボット。生産現場の自動化を強力にサポートし、コスト削減と効率化を実現します。
工場の自動化を強力にサポート
FCSの採用で解決するかもしれません!
・搬送のトラブルの原因は、ほとんどがワークピースの移載時に発生しています。
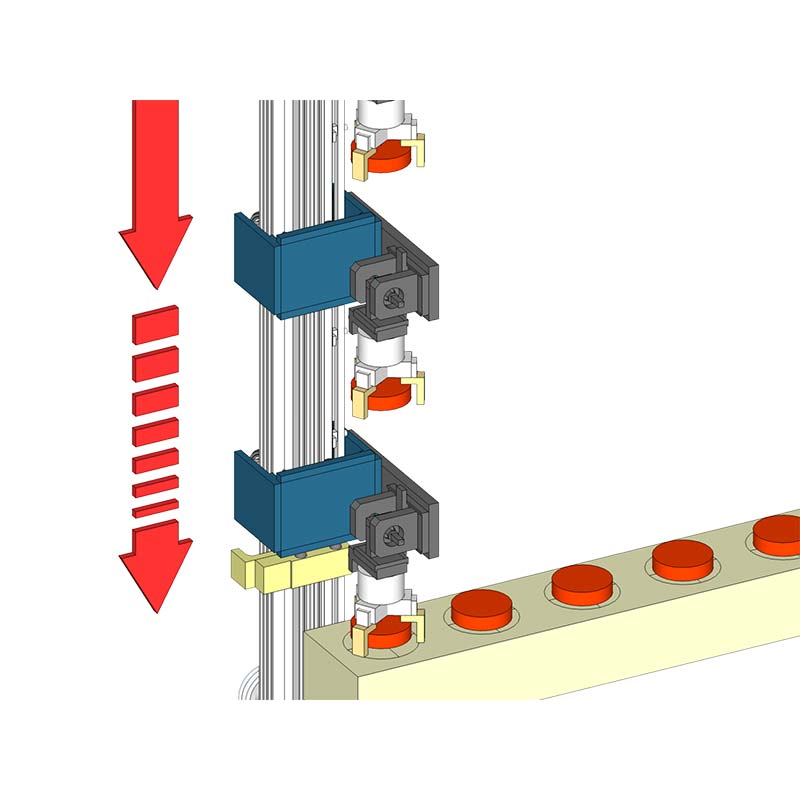
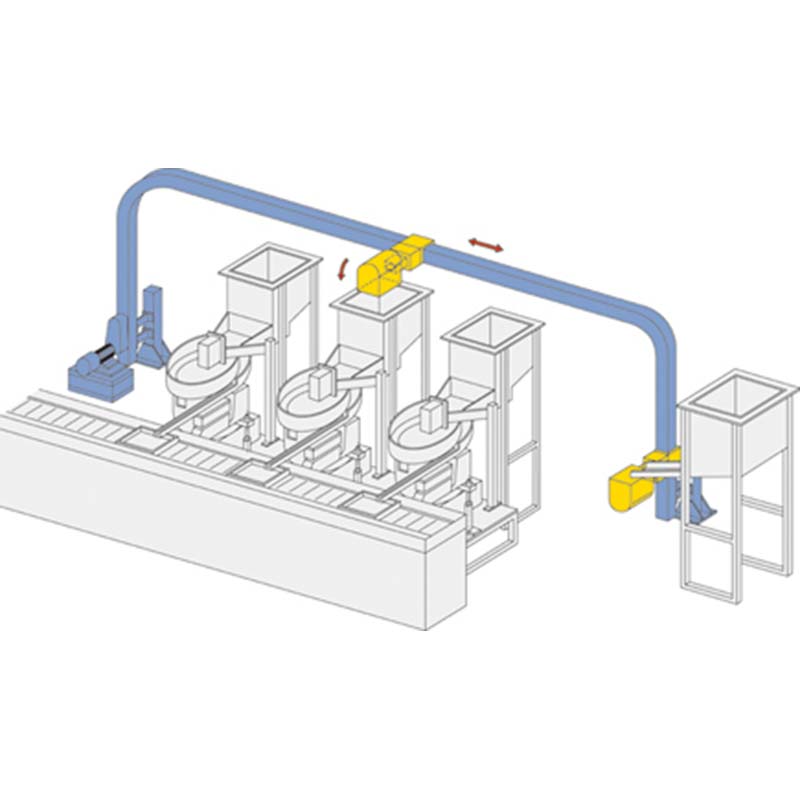
・FCS(フレキシブルキャリヤシステム)は、限られたスペースを有効に活用した3次元的な搬送経路の構築が可能。チャック機能(空圧保持機構付き)により、ワークピースをダイレクトに搬送します。
・目的地へ到着して定められた姿勢で排出するまで不要な移載をしませんので、ワークピースの衝突、コスリ等による不良品がなくなるだけでなく、詰りや引っ掛りなどによる生産ラインのチョコ停がなくなります。
・ジャストインタイムで搬送することで、リードタイム短縮だけでなく、ワークピースの溜り、仕掛かり品がなくなり生産管理を厳格化することが可能です。
・ロボットシステムと連携し、ロボットの作業範囲を補完することで、より効率的な生産ラインを実現することも可能。生産性の飛躍的向上を目的としたクリエイティブなシステムにより搬送課題を解決します。
F C S の製品特徴
POINT 01
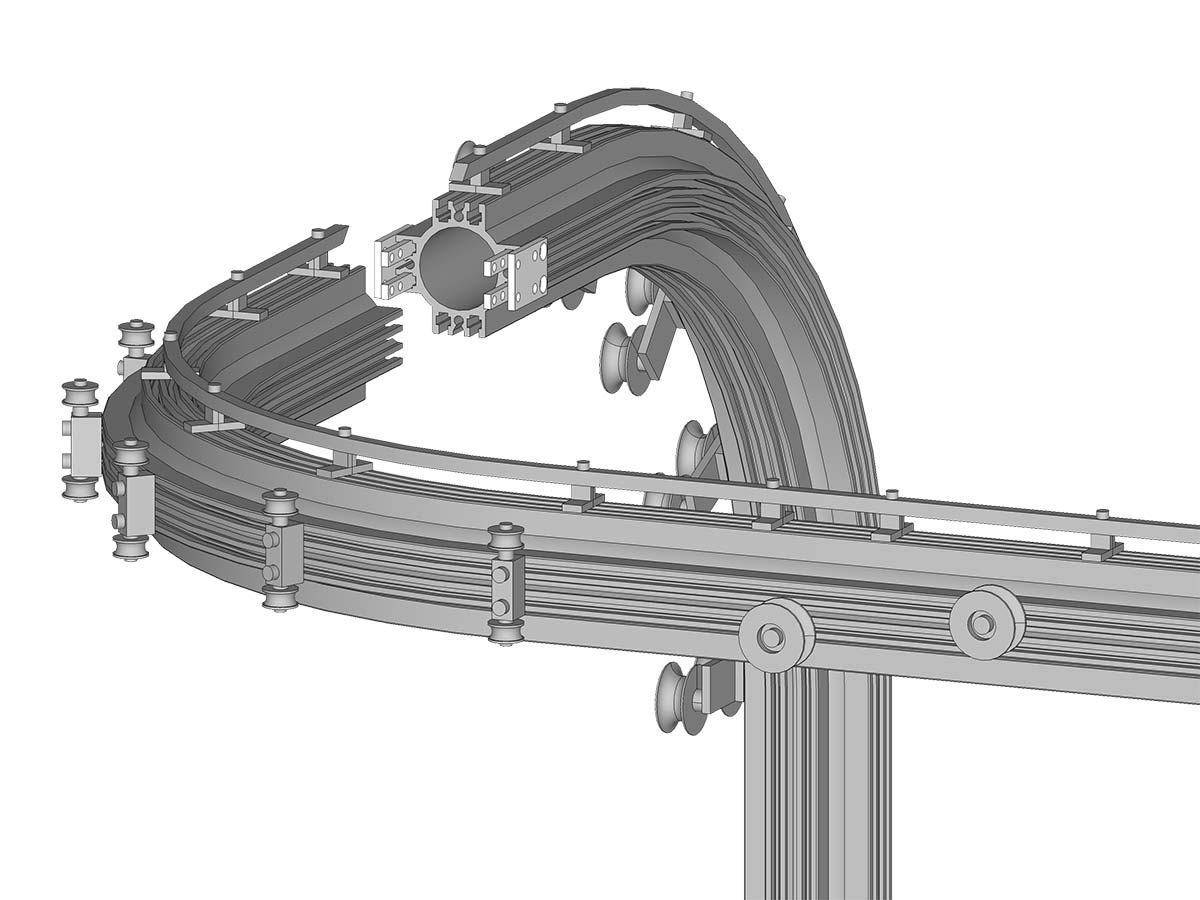
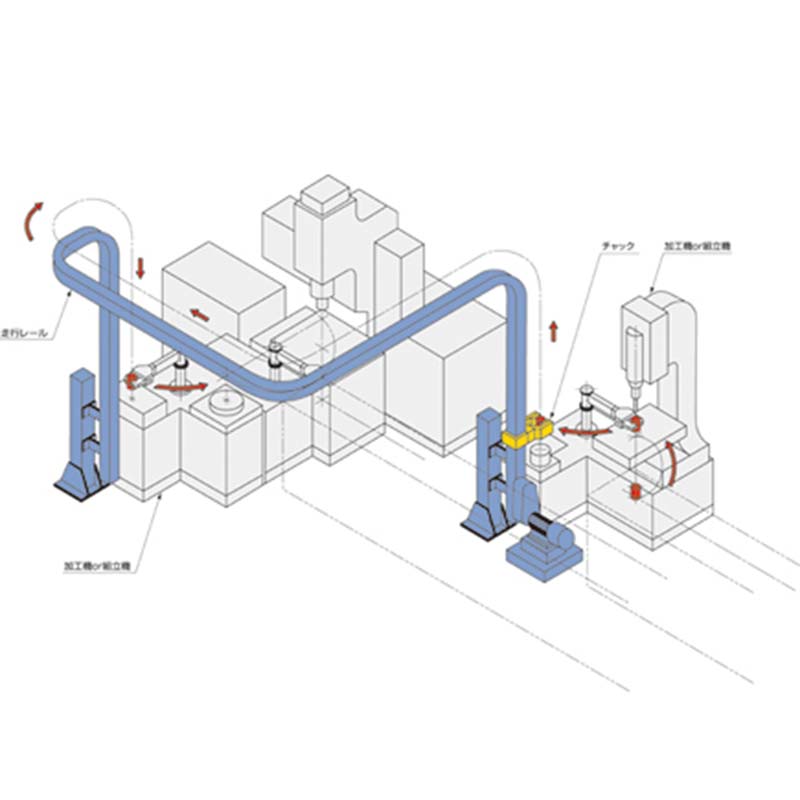
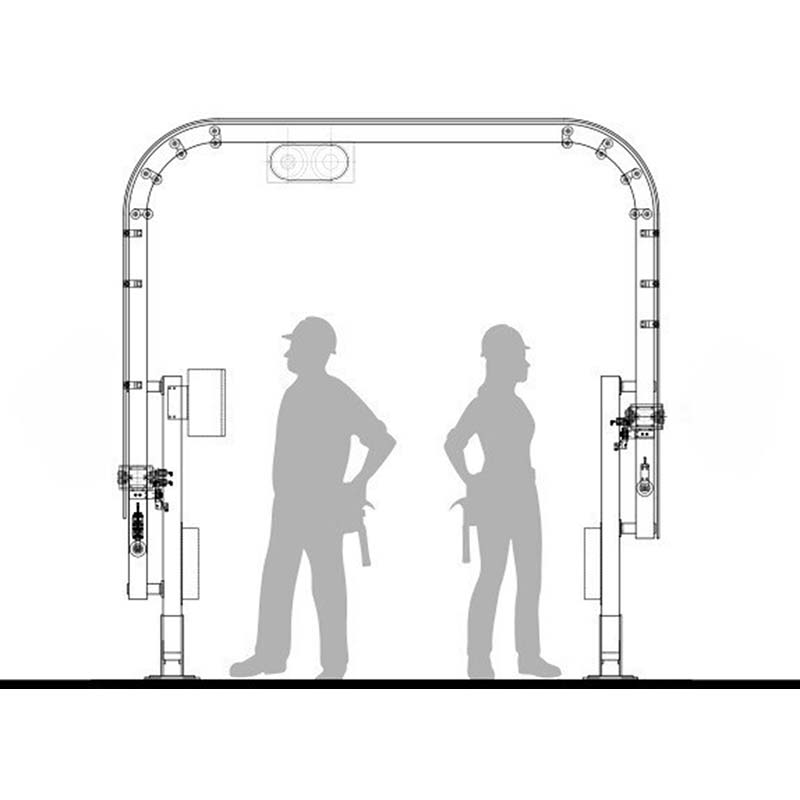
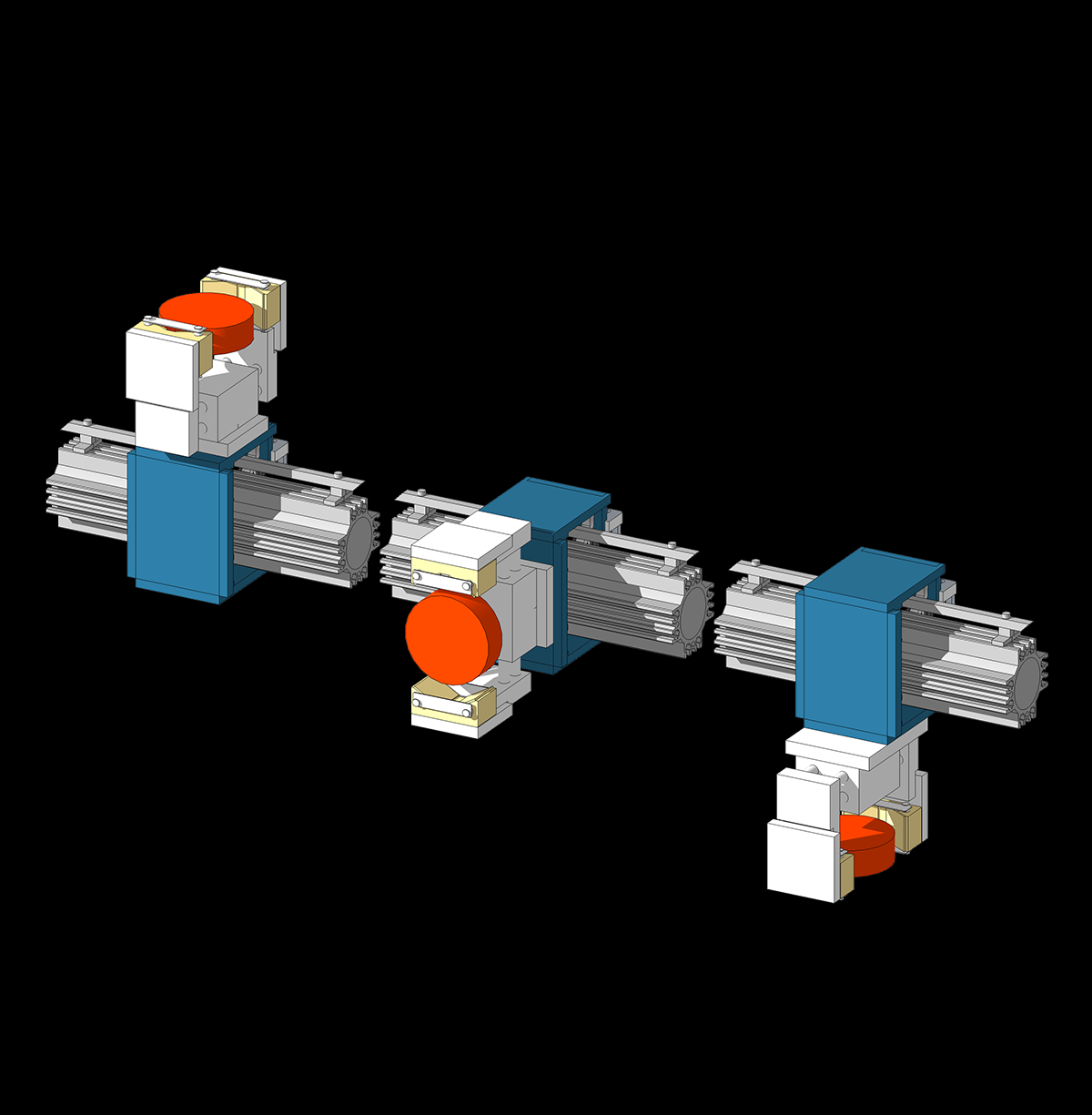
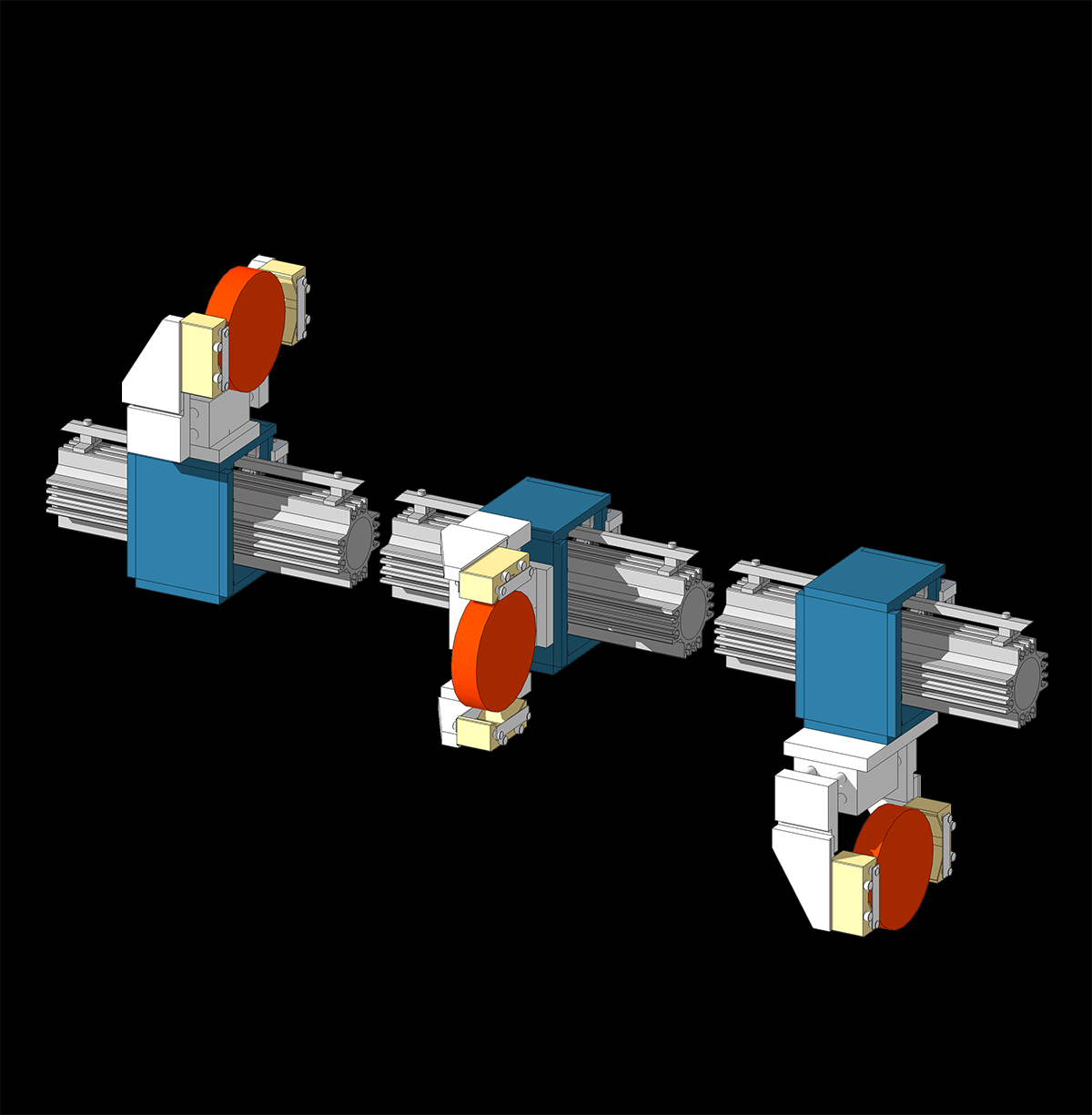
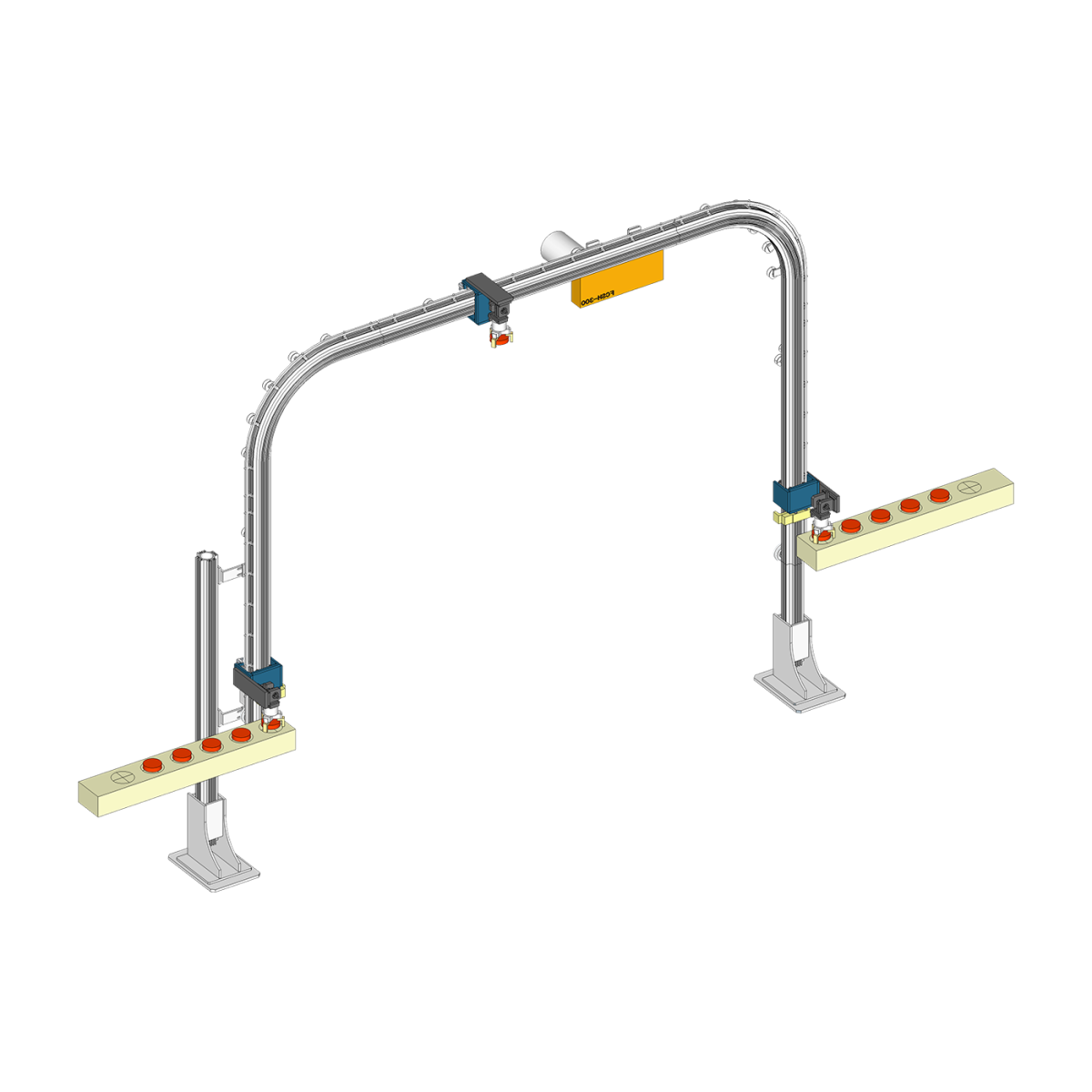
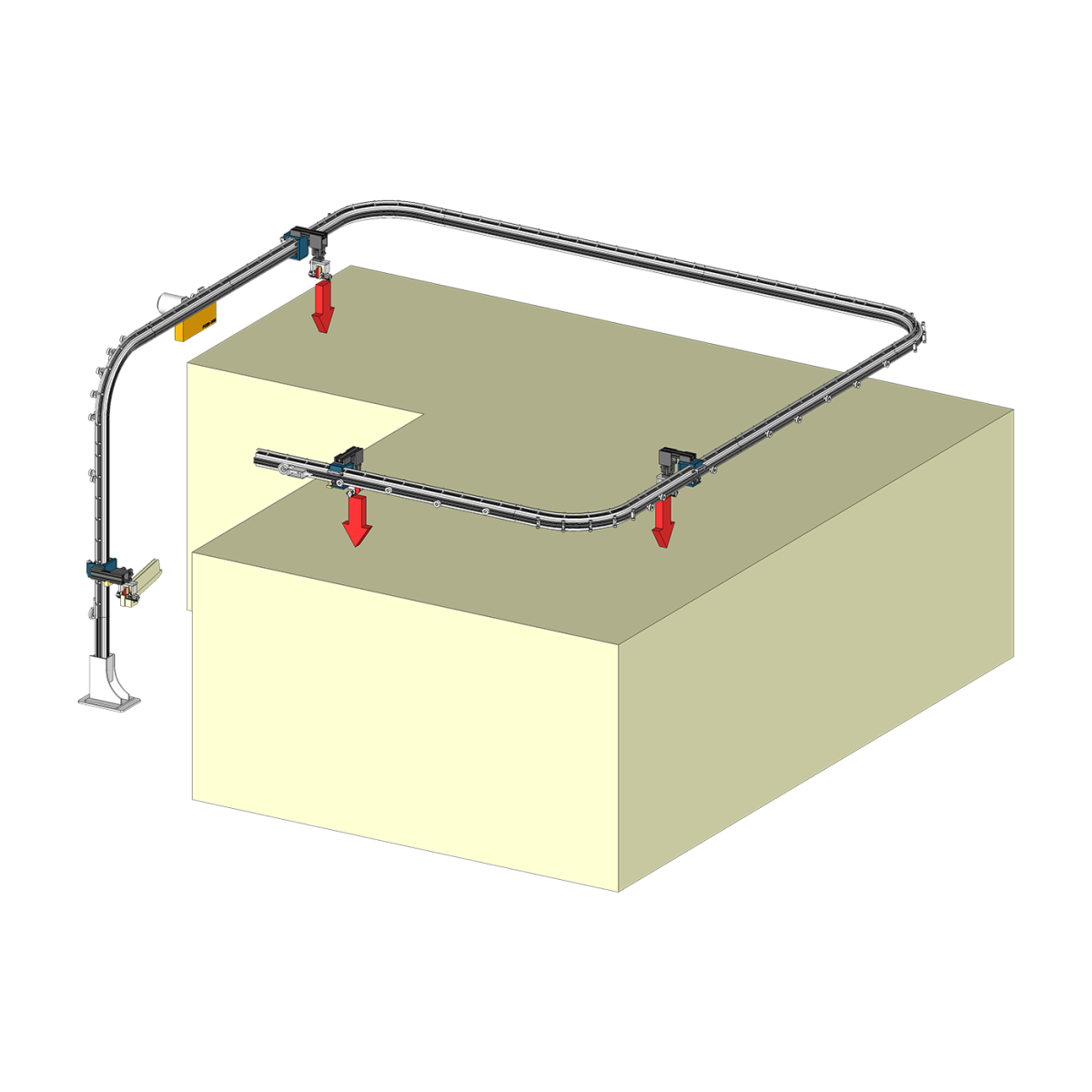
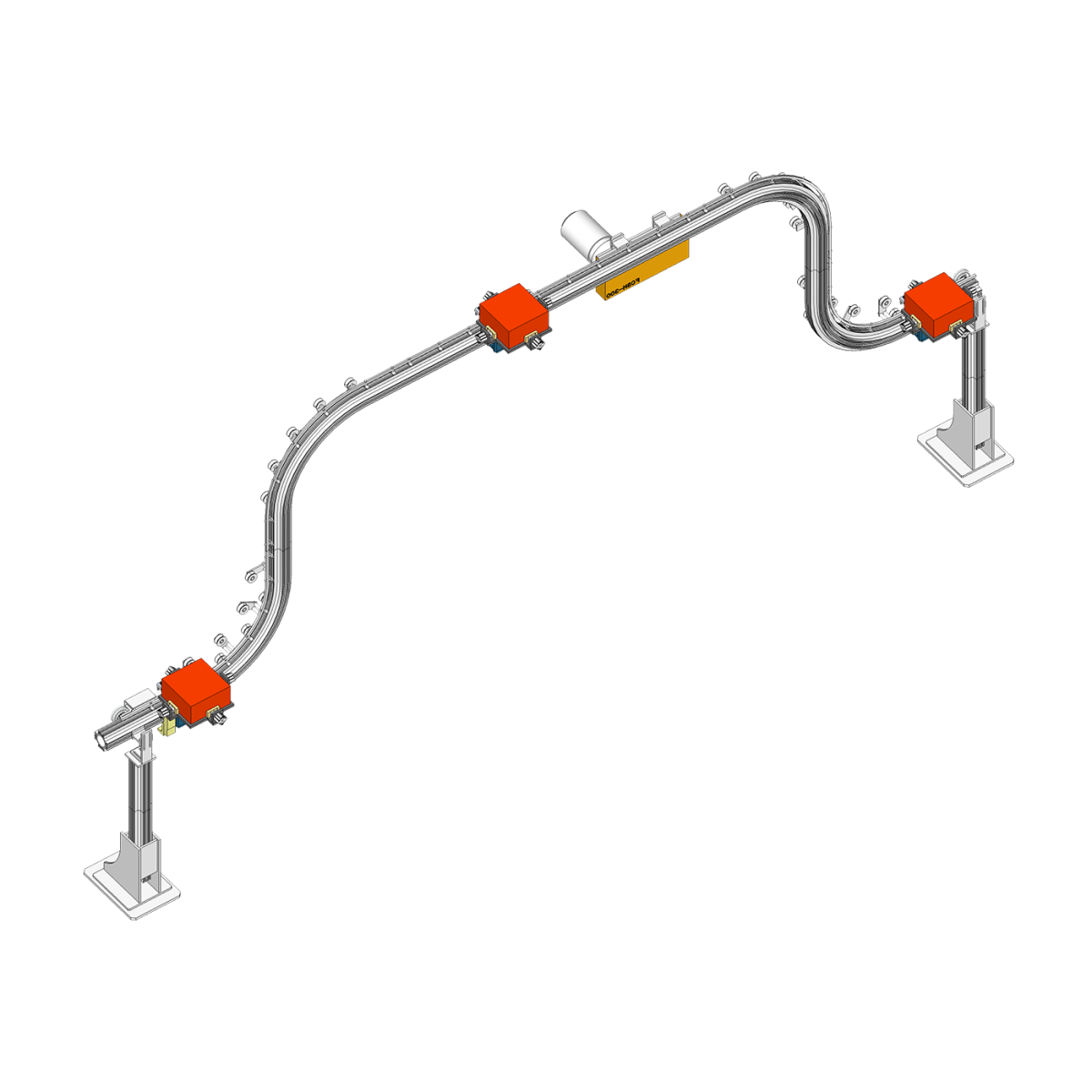
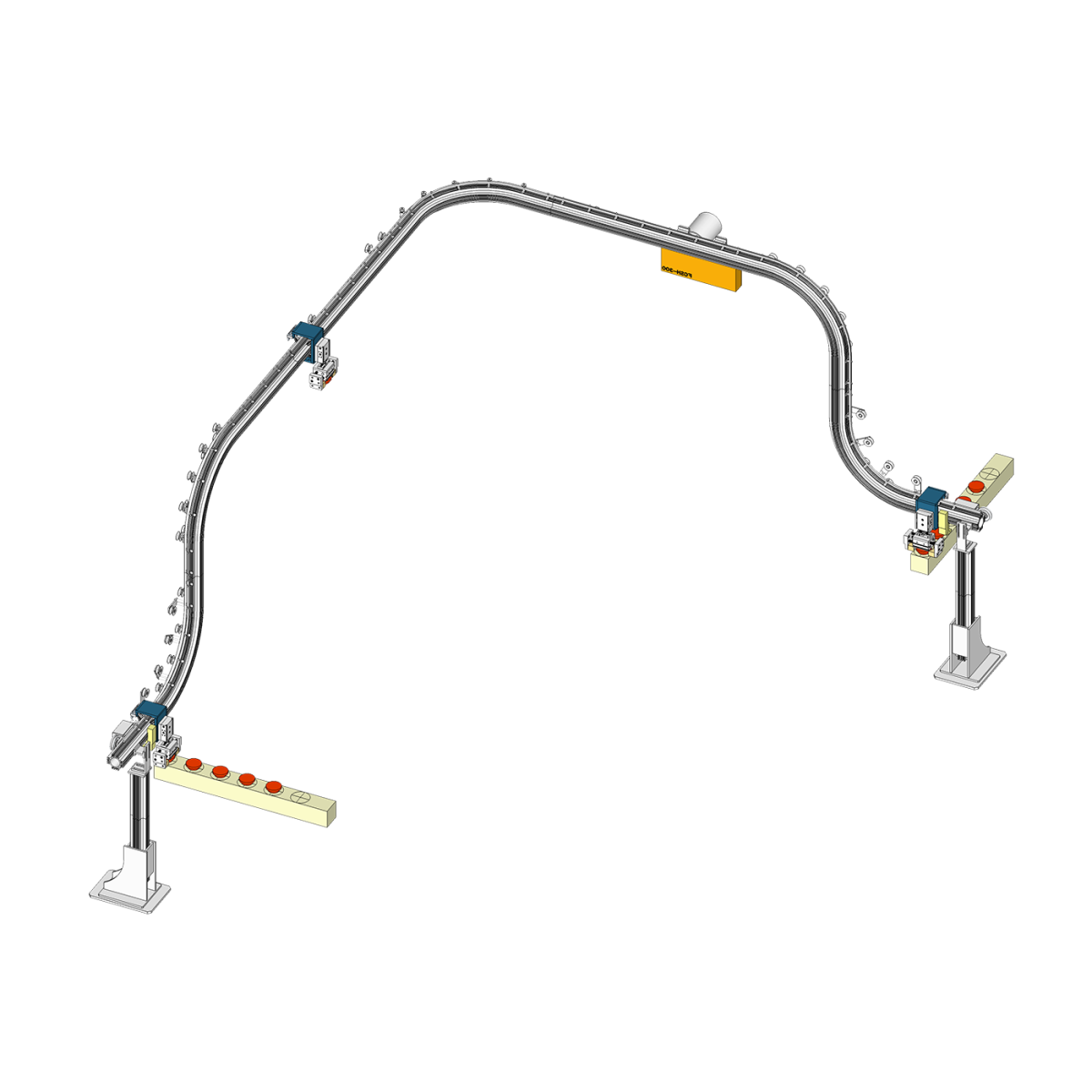
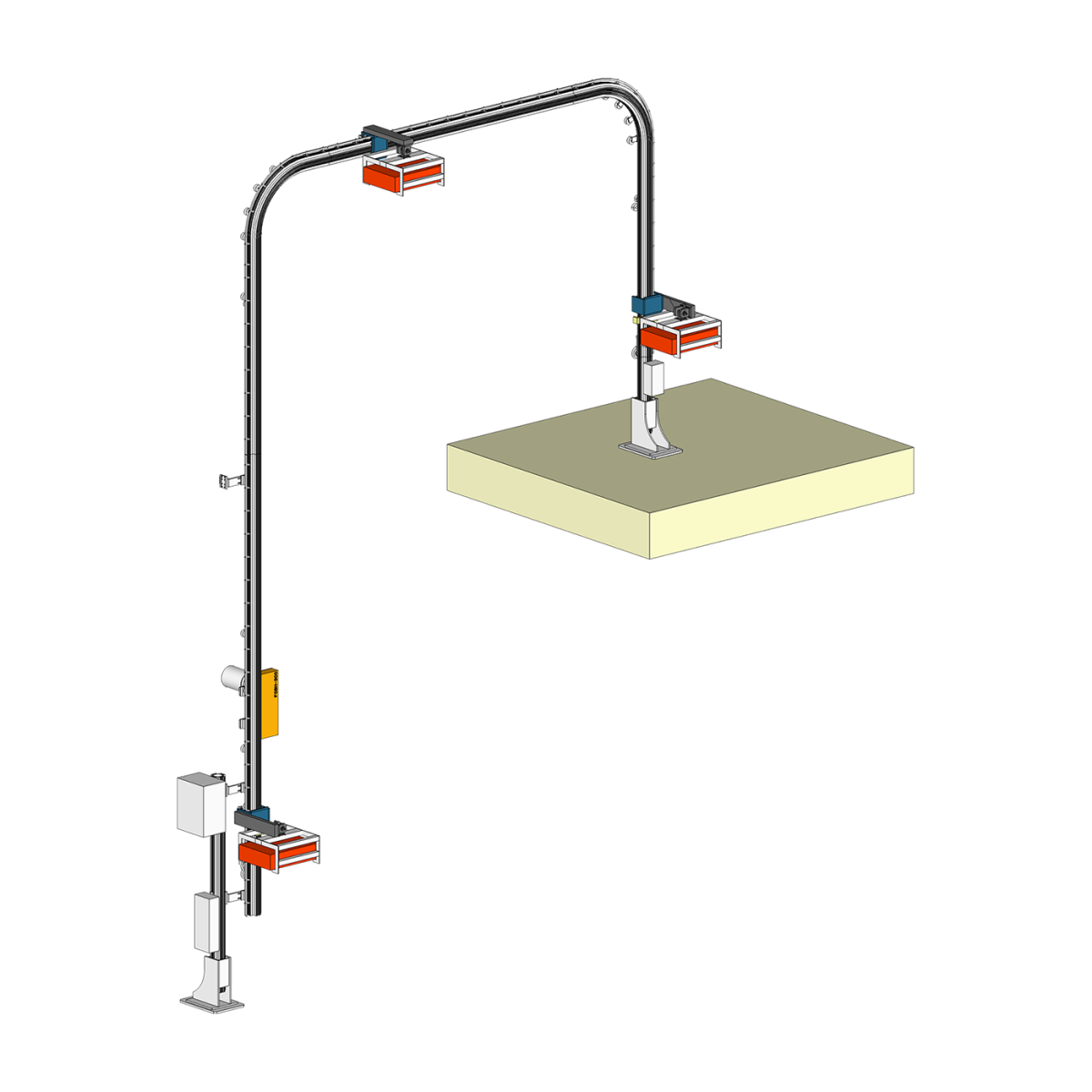
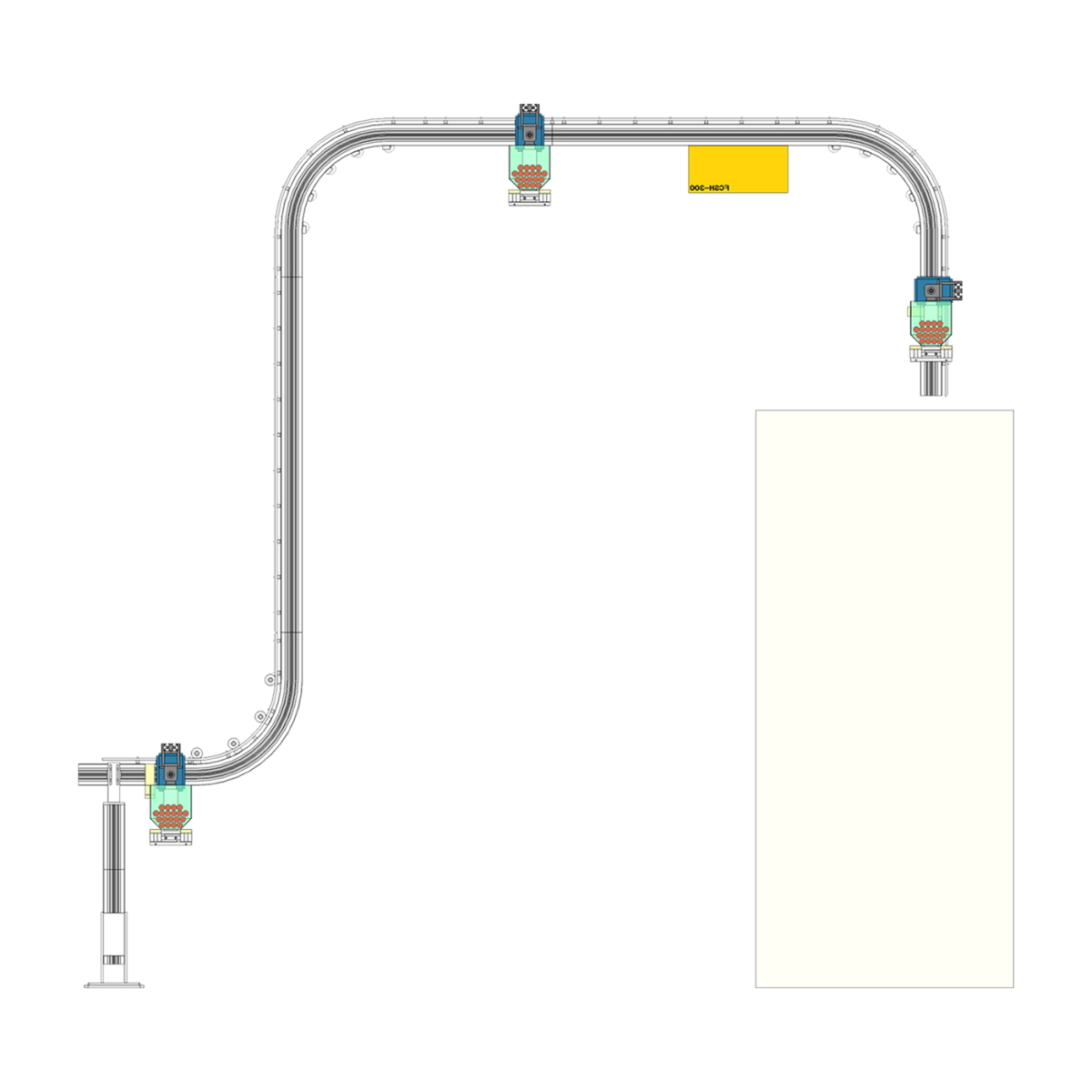
FCS(フレキシブルキャリヤシステム)は直線と曲線のガイドレールをフレキシブルに連結することで、多軸を使わずに3次元の搬送軌道を容易に構築することができます。
段差や設備の干渉物が多い現場にも対応し合理的な搬送経路を提供します。
POINT 02
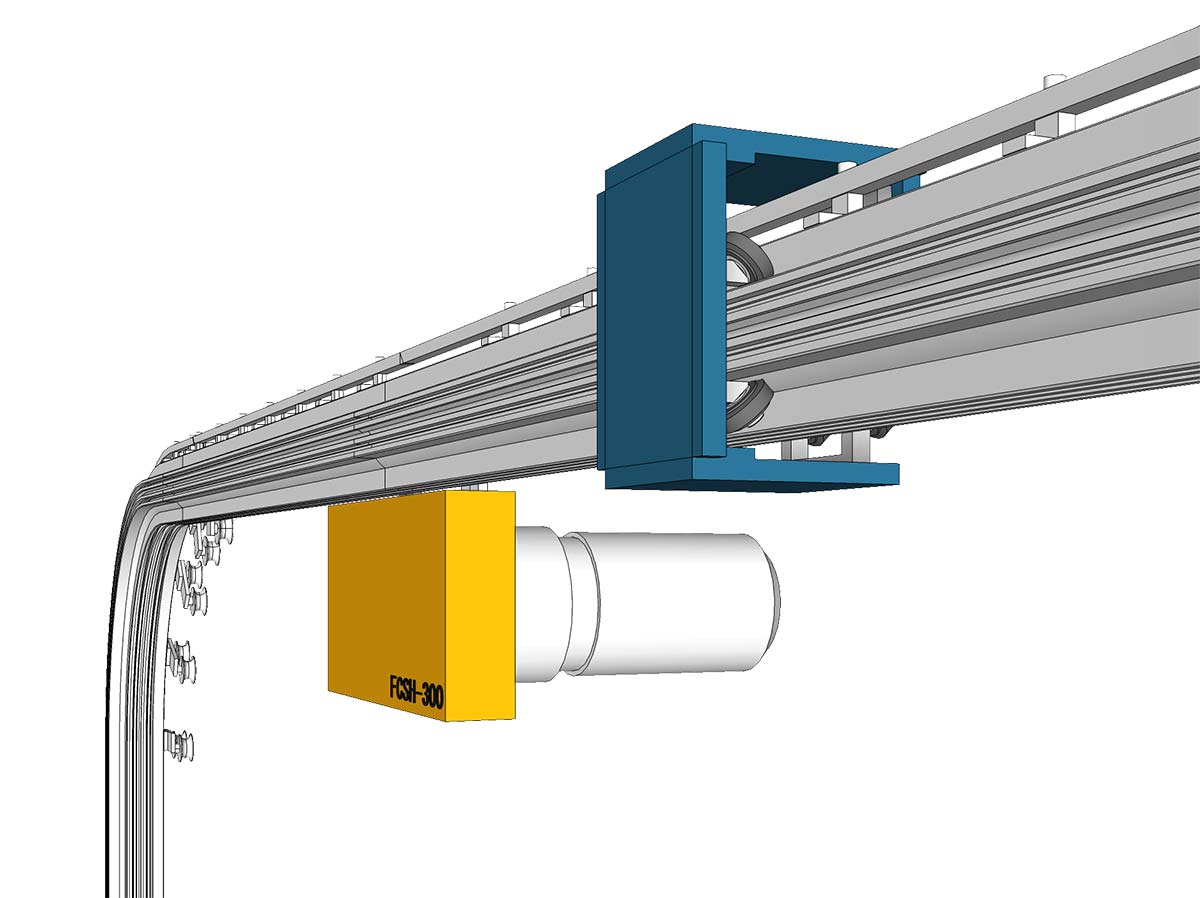
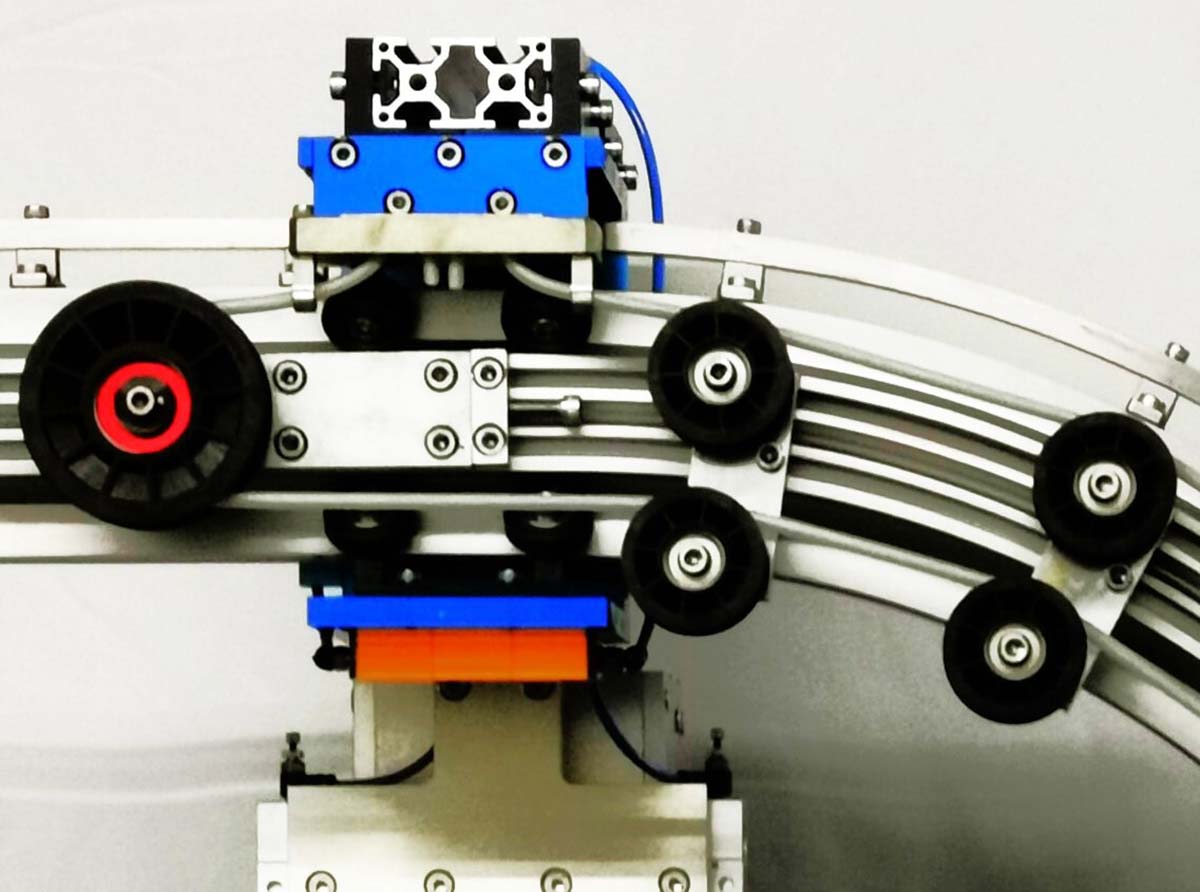
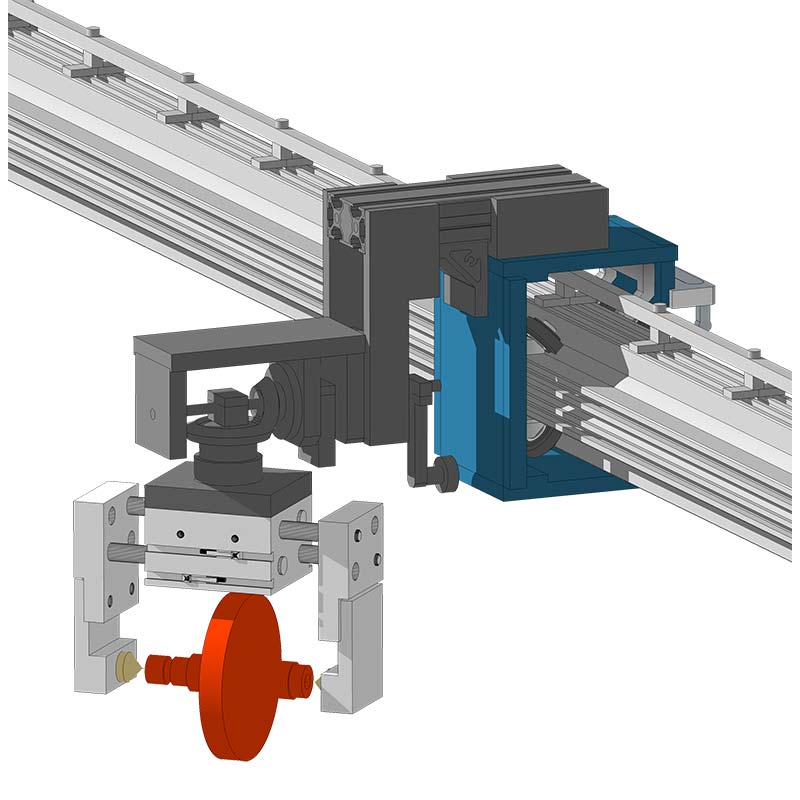
一つの駆動部(モーター)とワイヤーロープを介して、軌道上にある1台のキャリヤ(台車)を走行させる独自の方式を採用することにより小型軽量化を実現しました。
搬送重量も垂直搬送を含み10kg程度までの部品を高速搬送可能です。
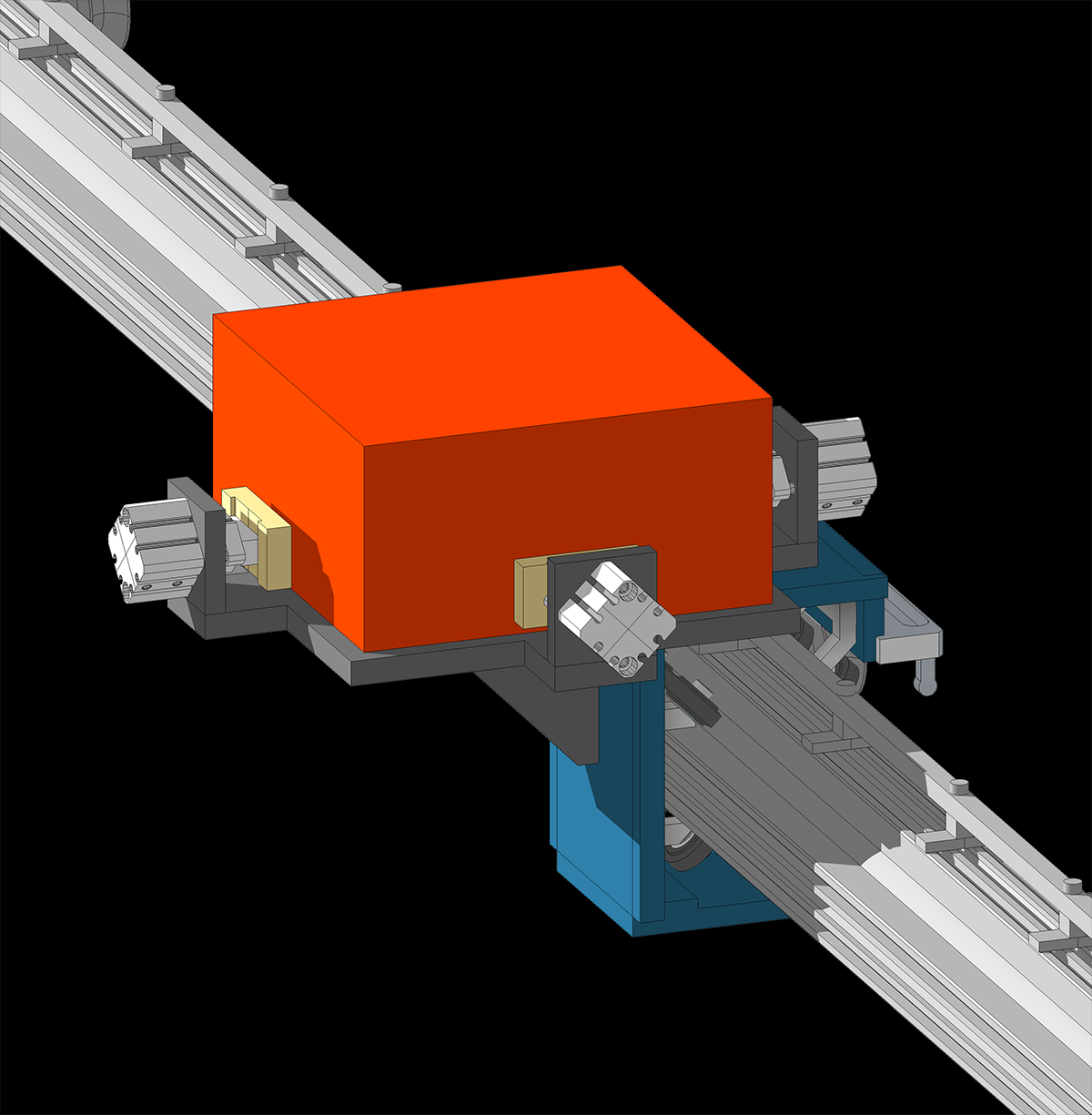
POINT 03
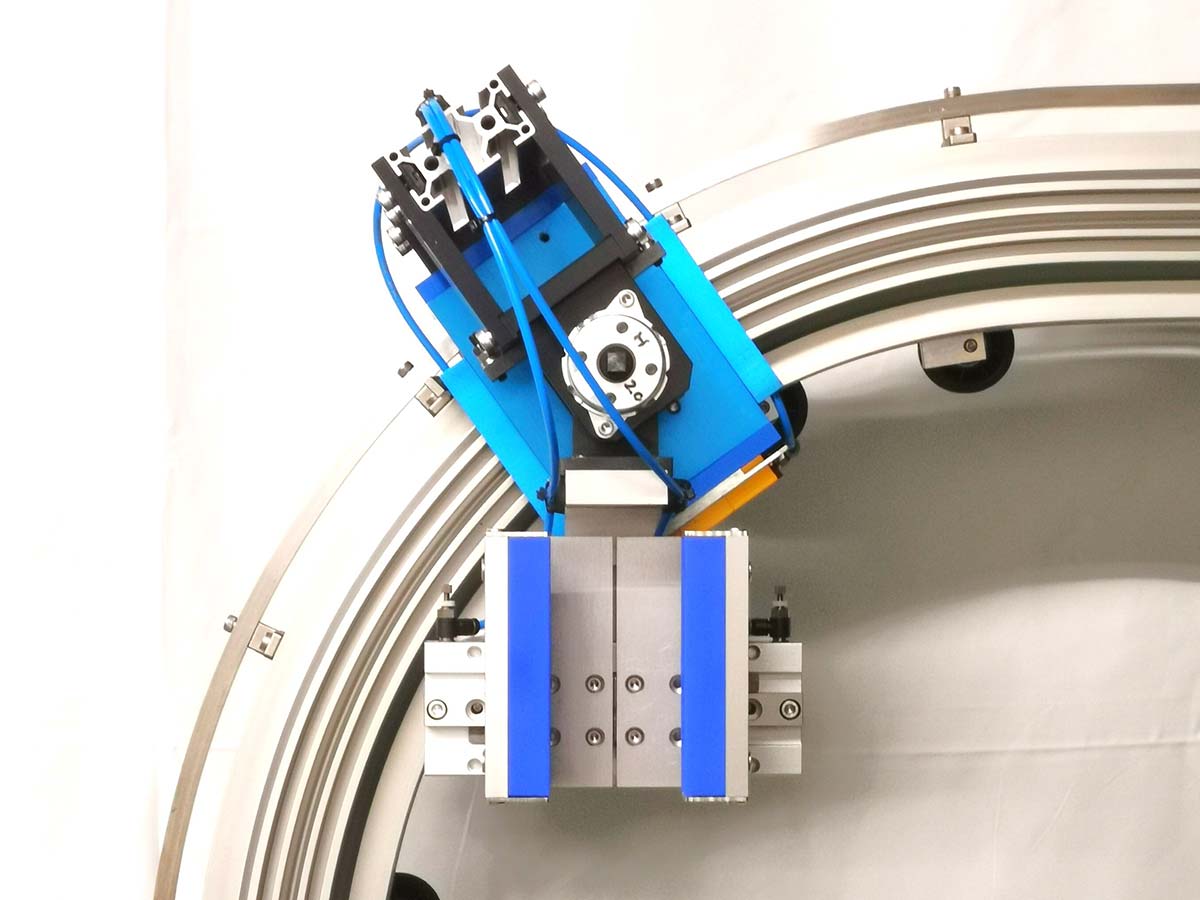
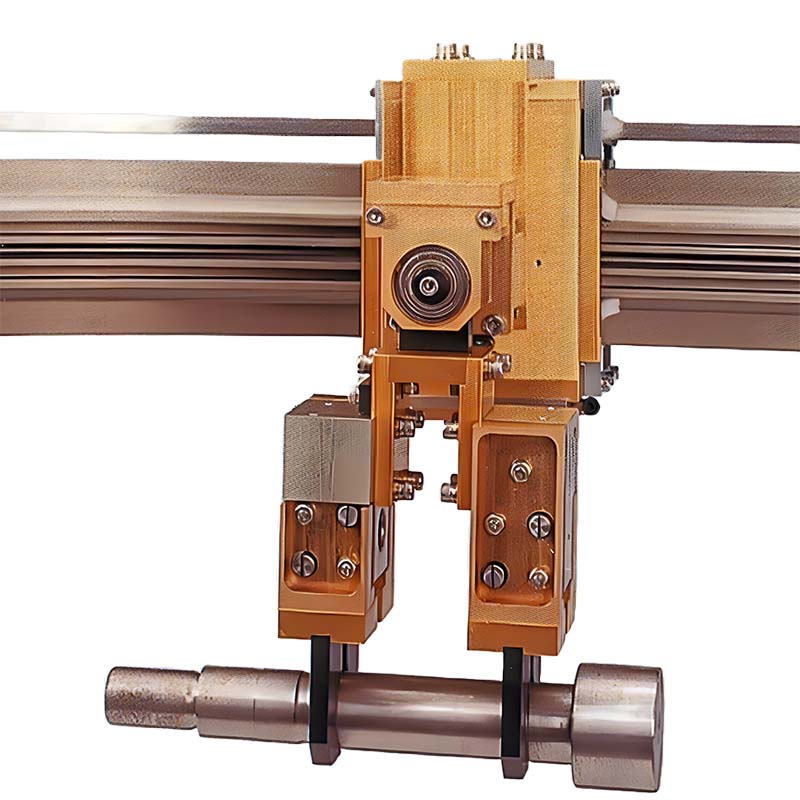
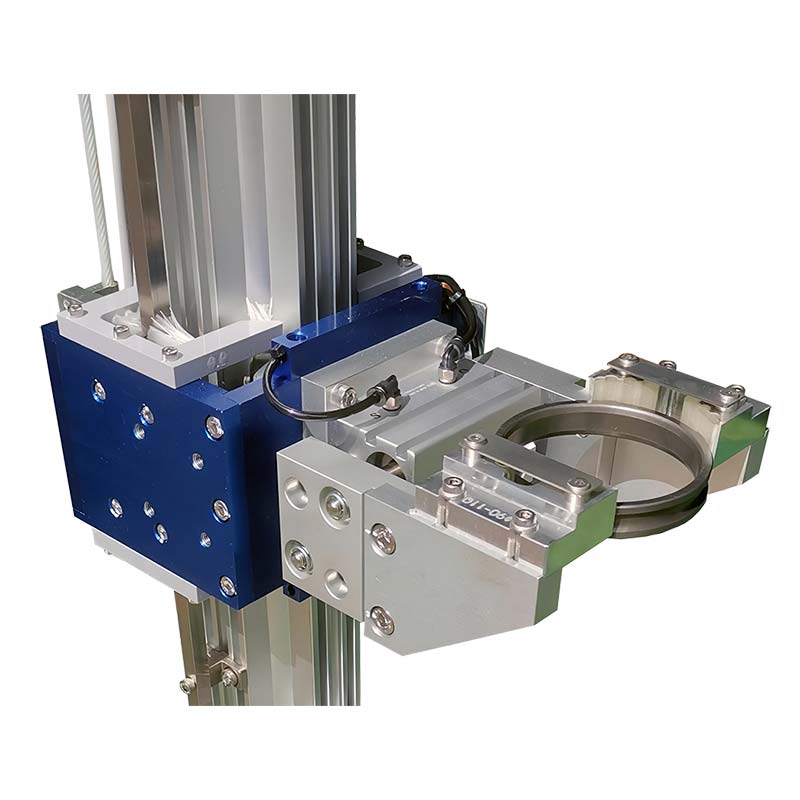
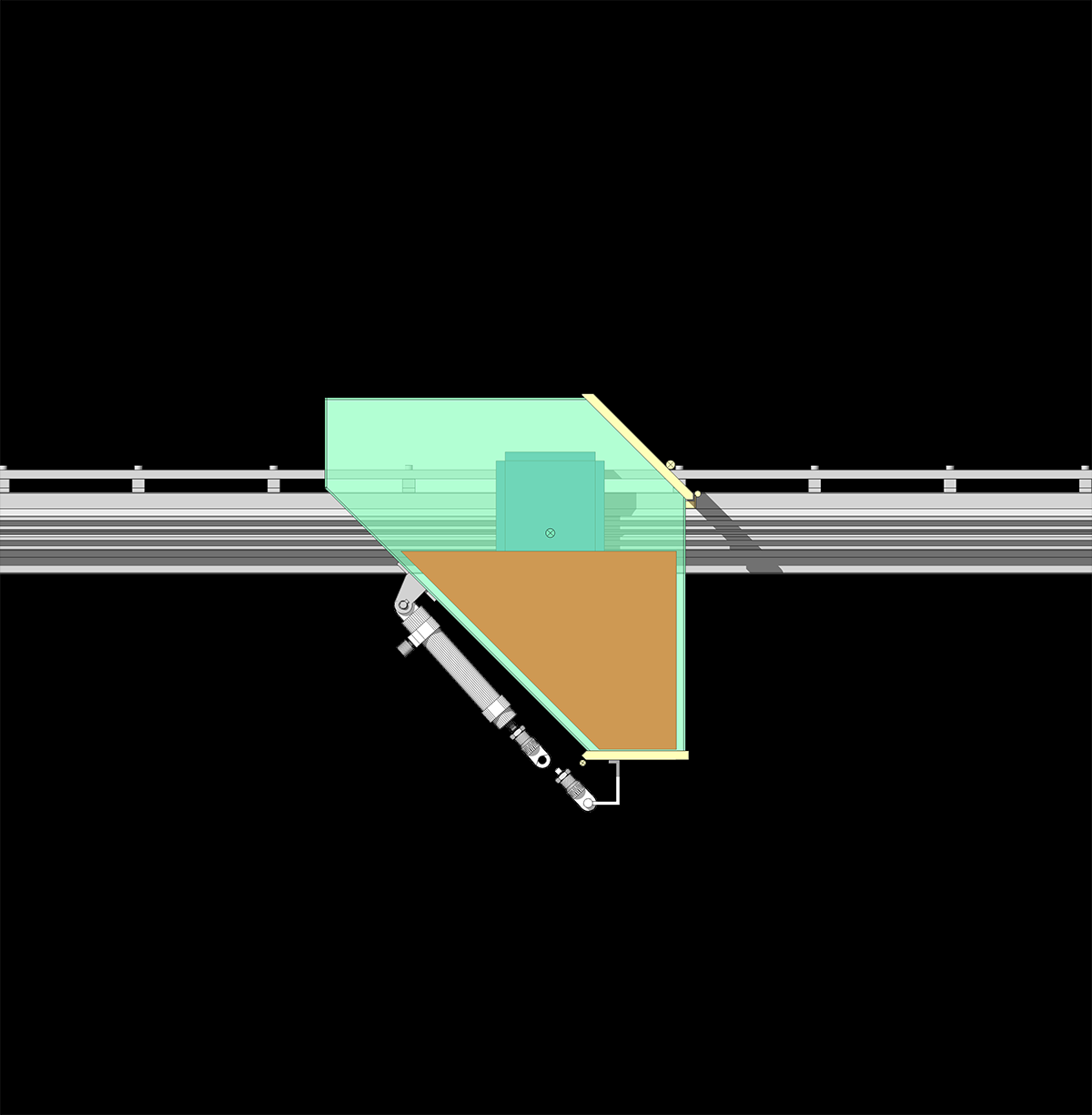
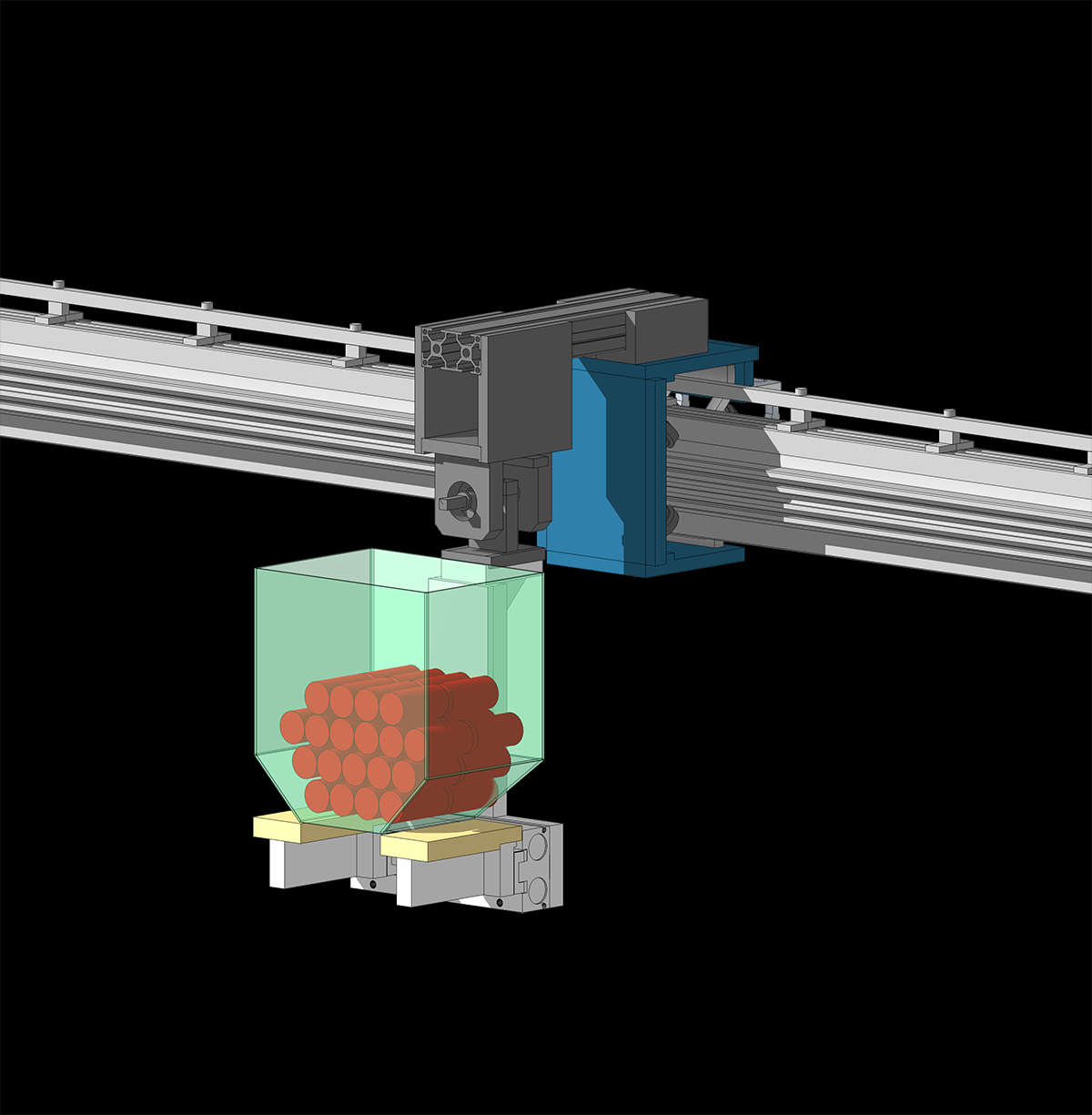
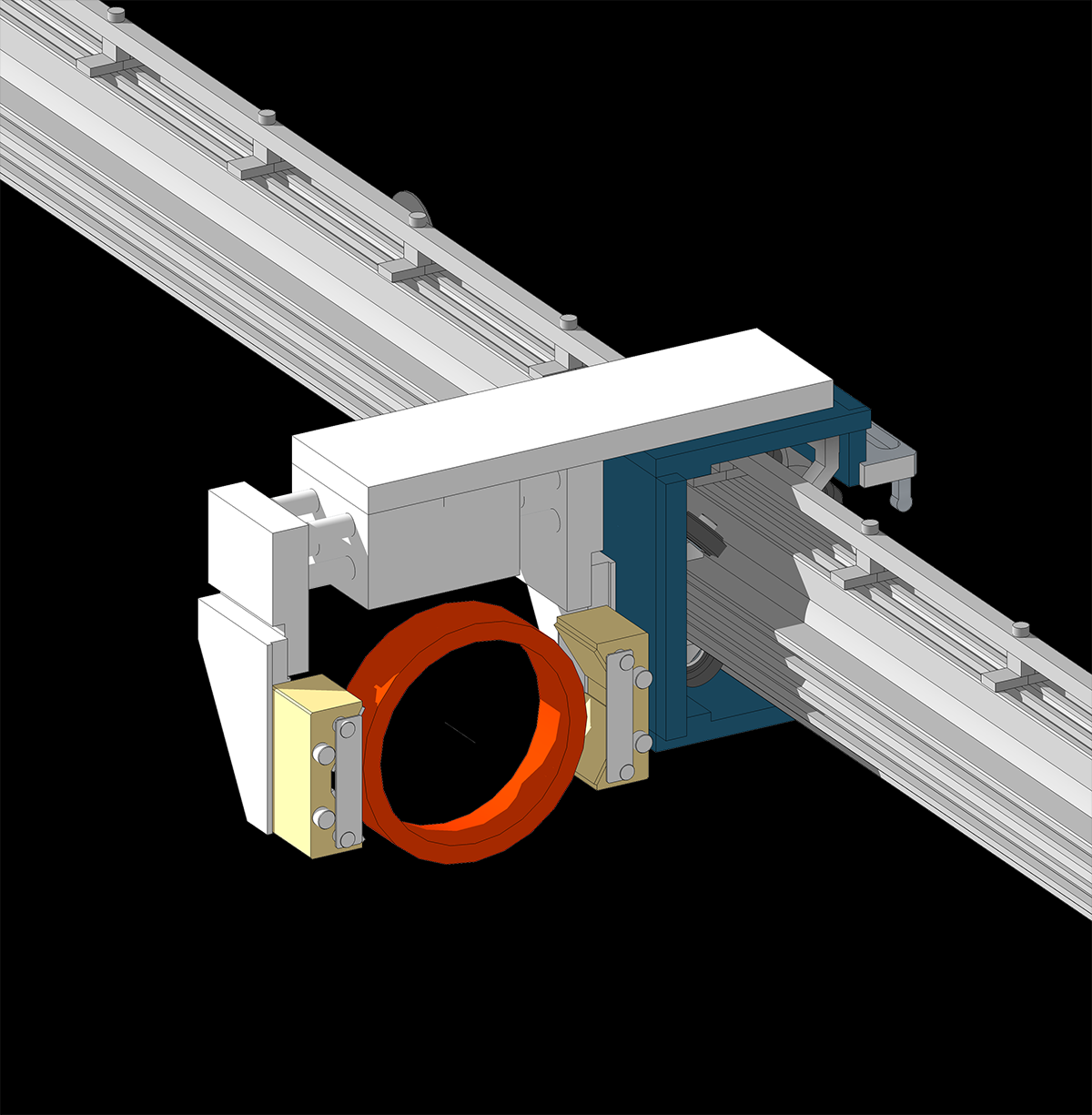
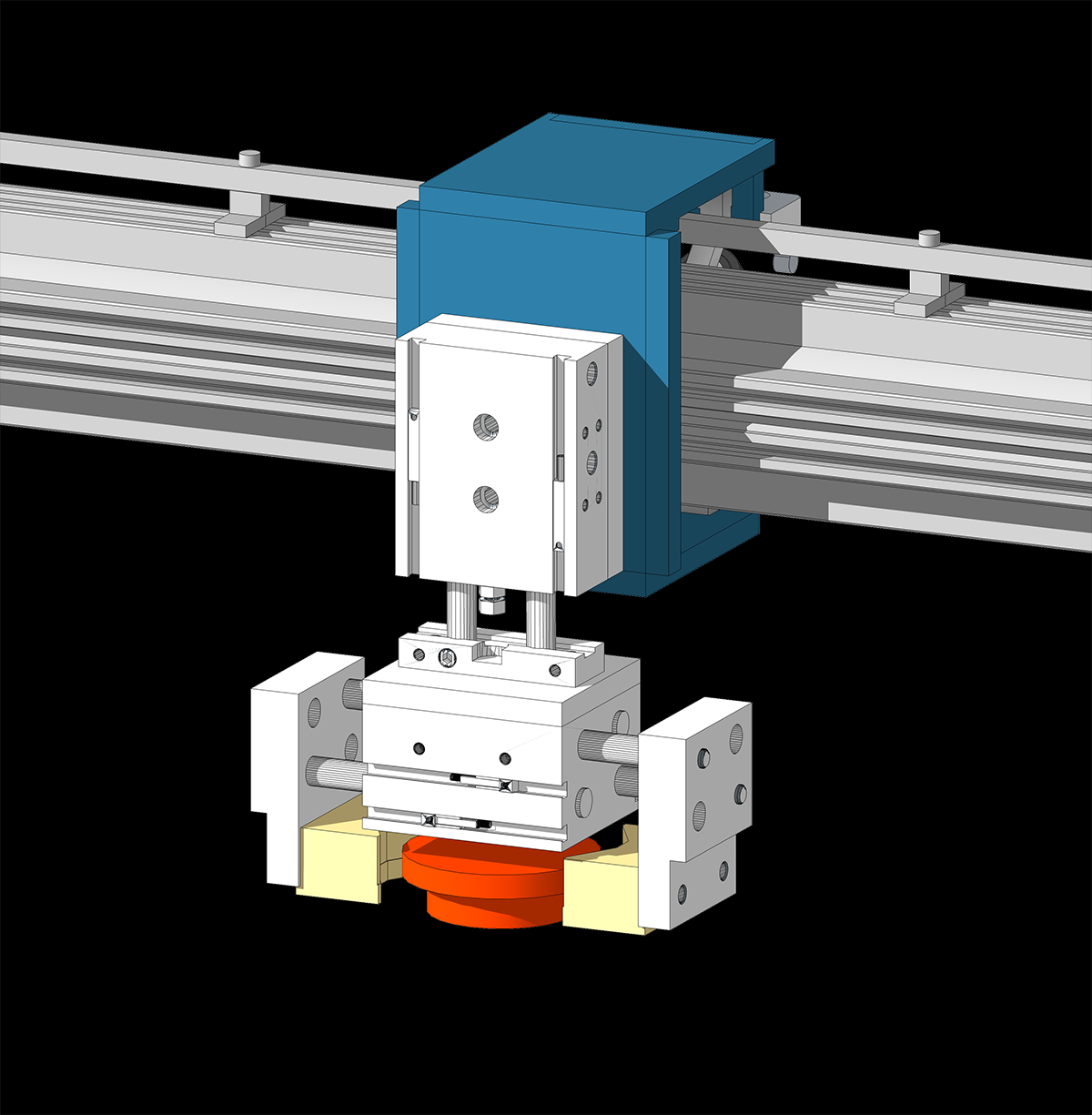
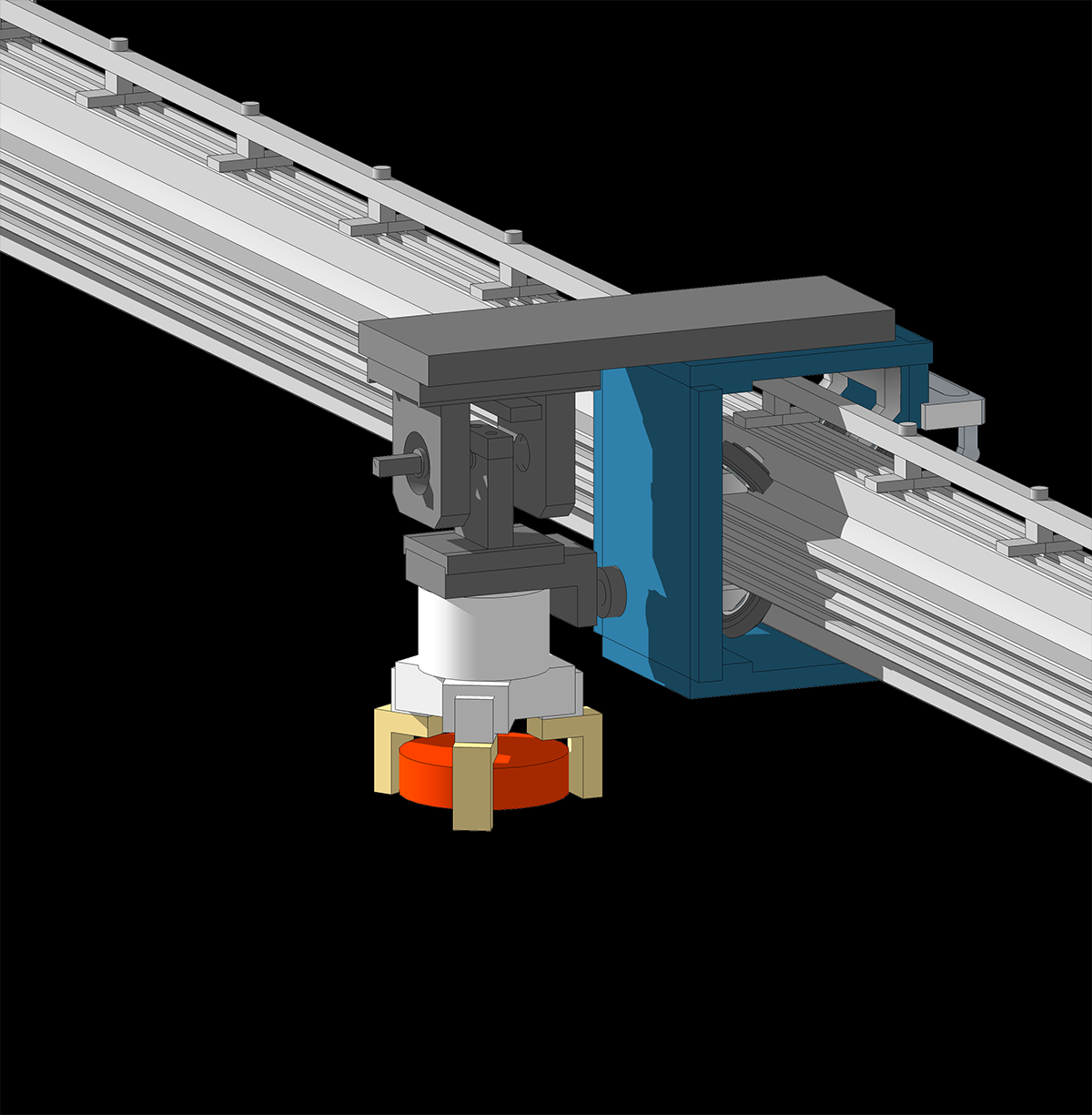
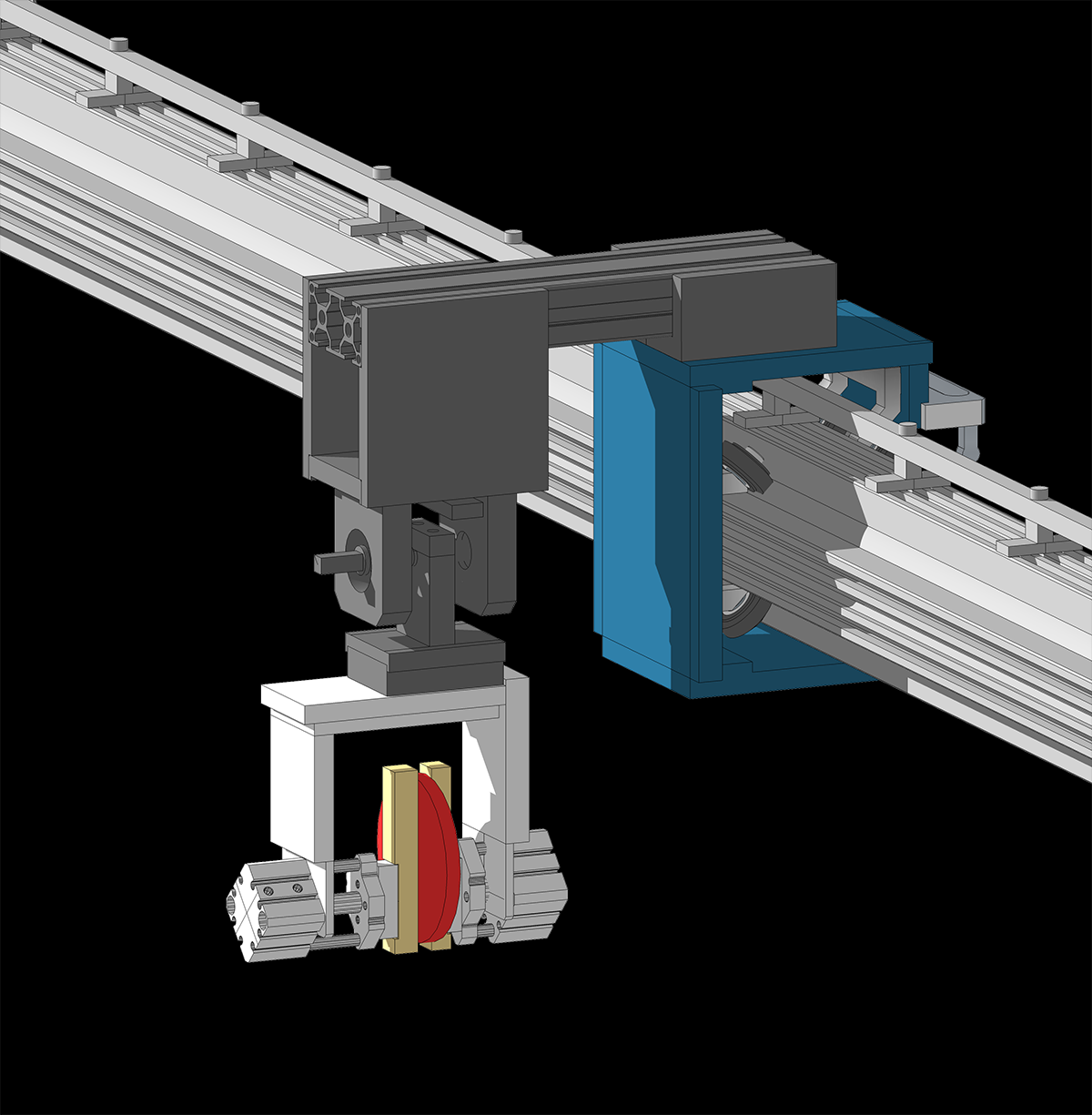
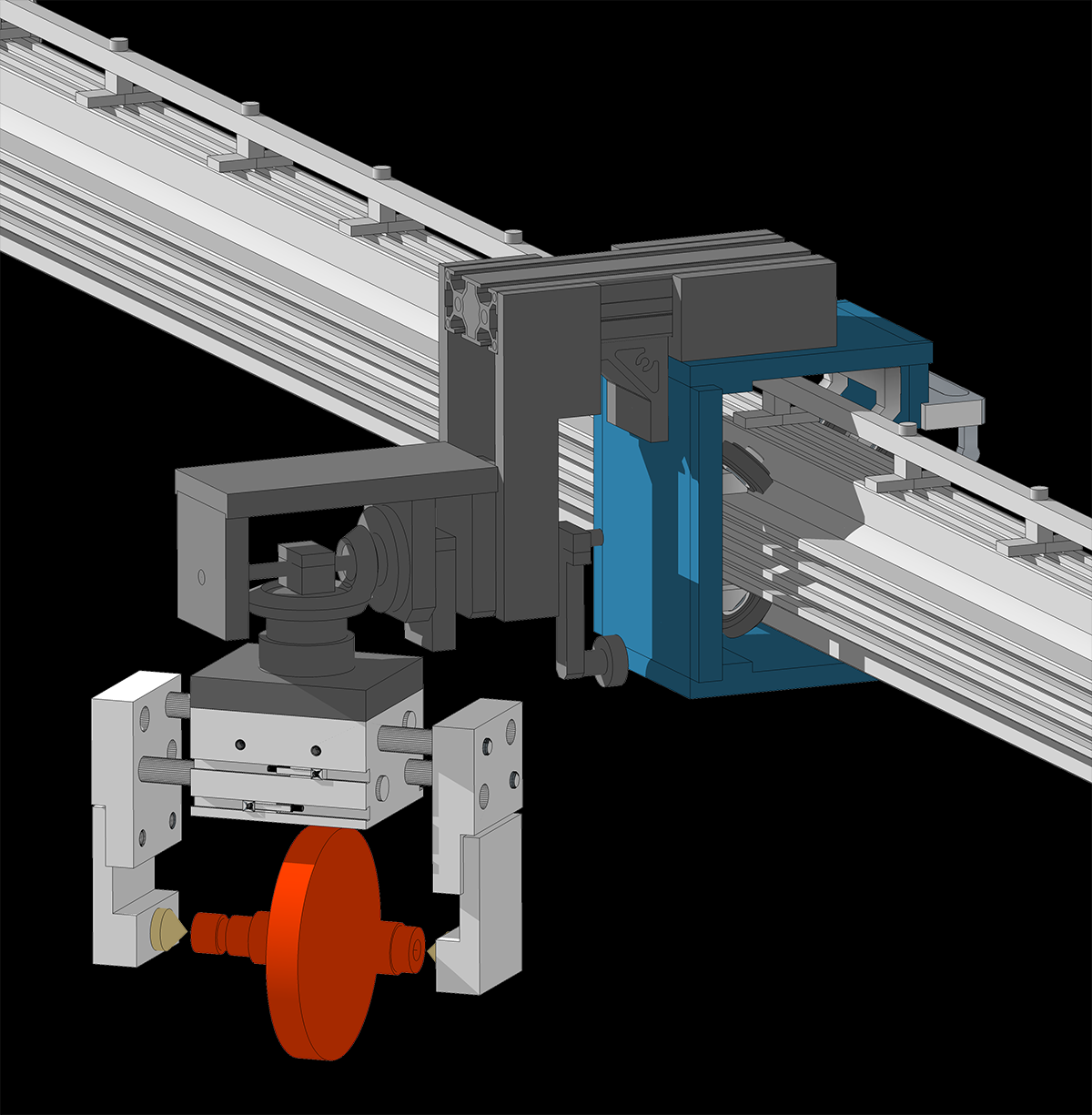
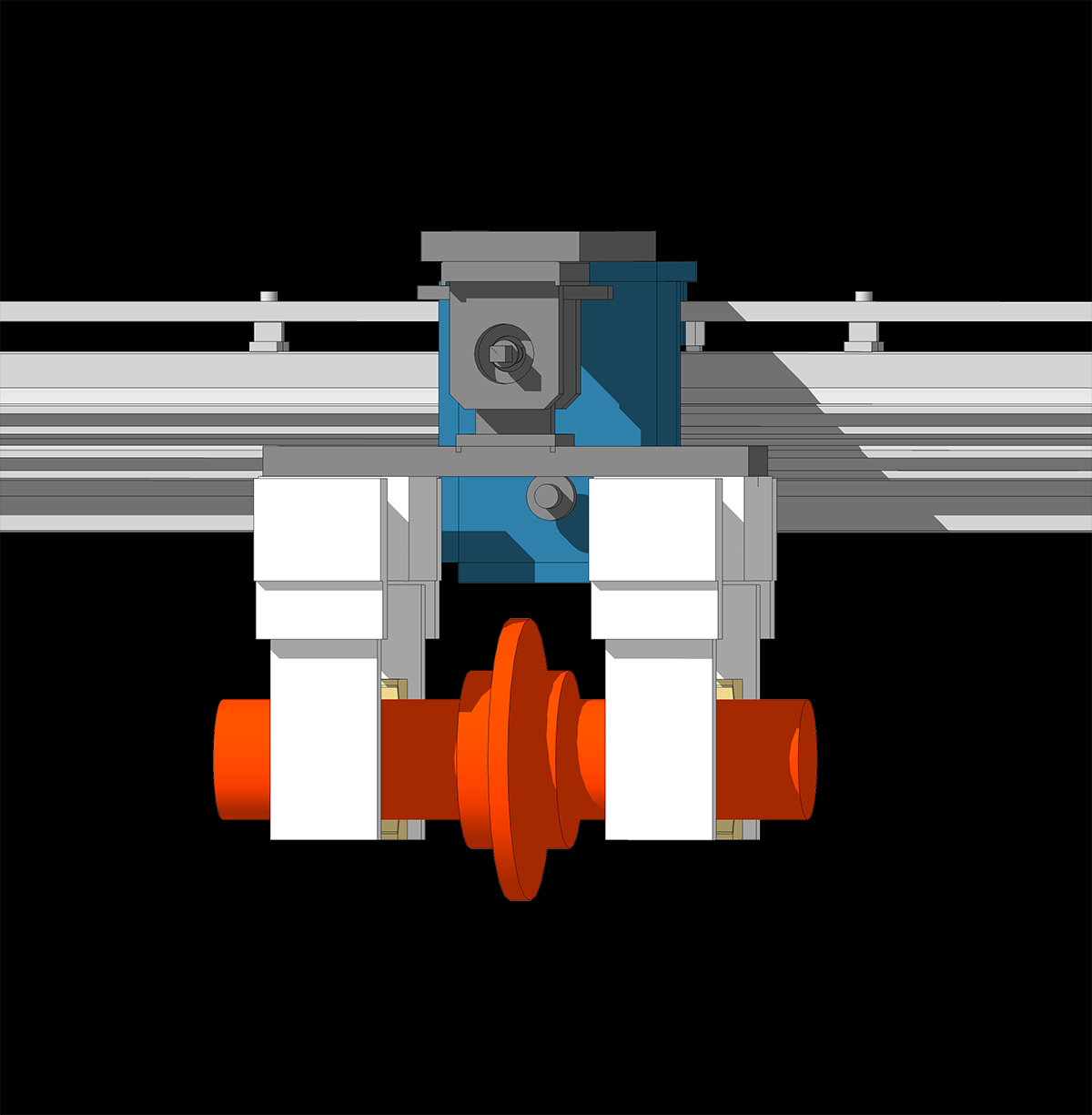
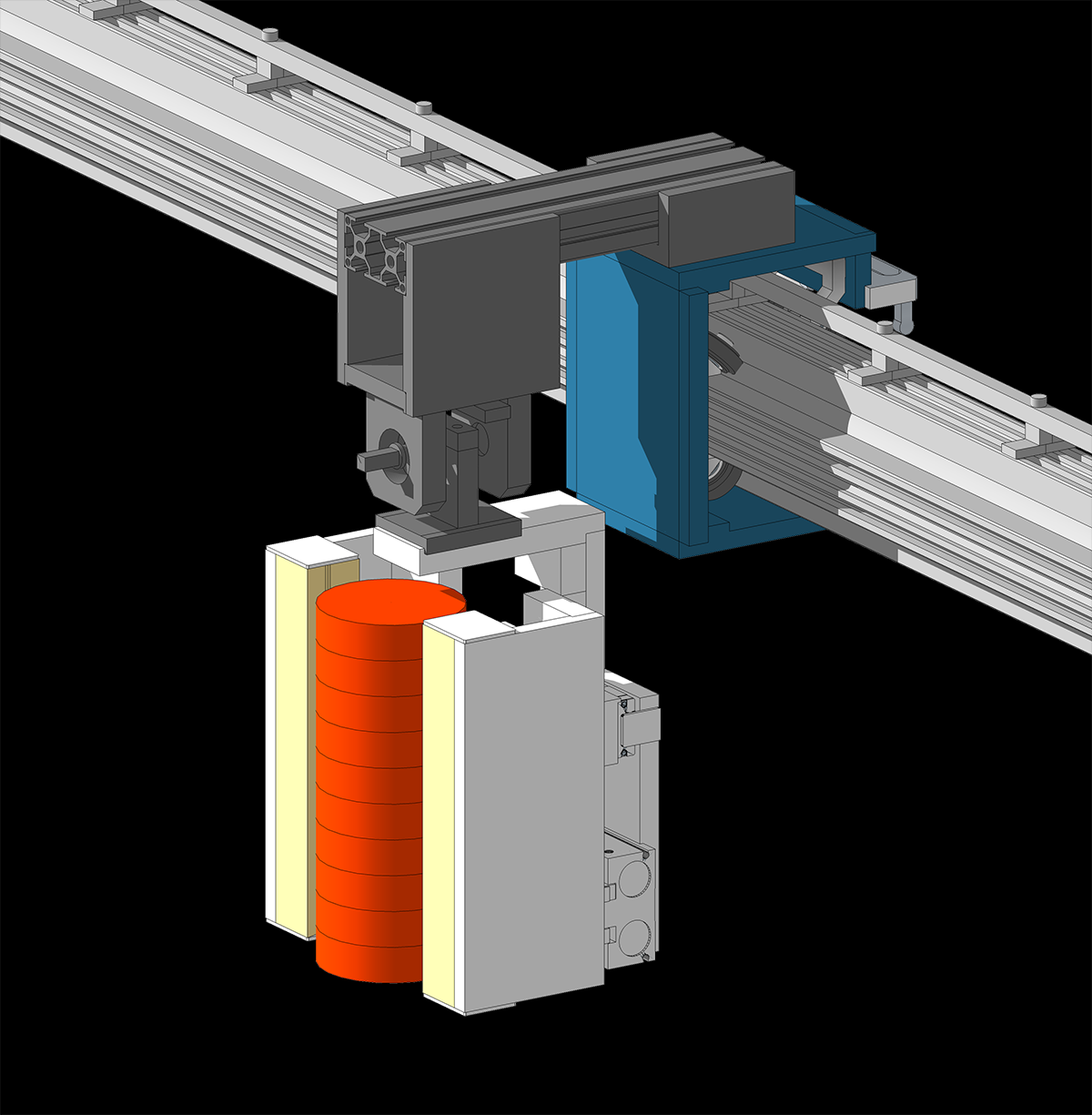
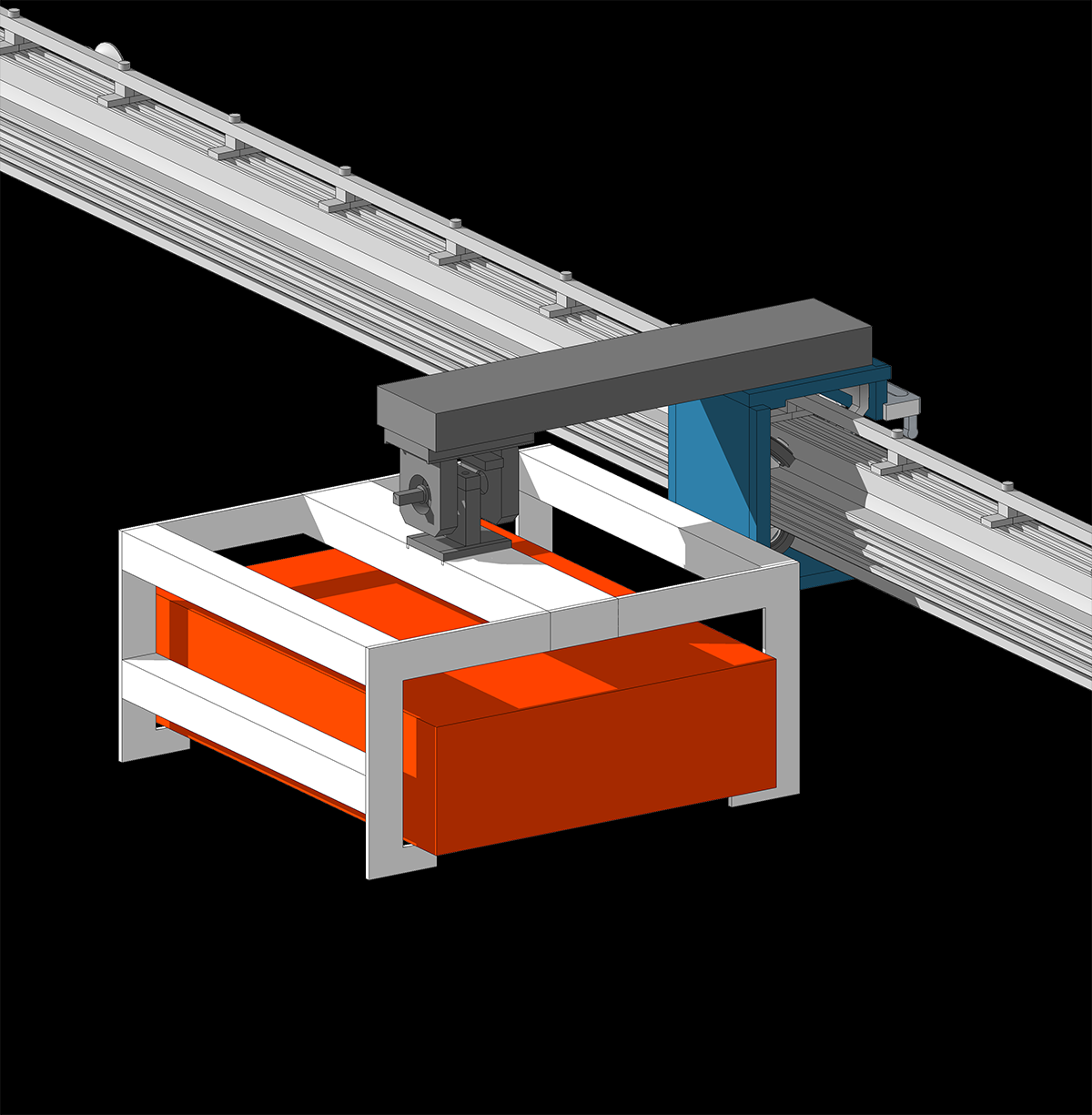
キャリヤ(走行台車)には空圧保持機構を搭載、ハンドチャックなどのアクチュエータを専用設計で自由に装着可能なほか、姿勢維持機構、姿勢回転機構等、実績のあるオプションも採用可能です。対象ワークピースには自動車部品、家電部品、基盤、粉体原料など幅広い実績があり、アイデア次第で様々な用途に使用できます。
POINT 04
コンパクト駆動・メンテナンスが容易なシンプル設計
FCSはコンパクトに設計され設置が容易なだけでなく、駆動部がキャリヤと分かれているためメンテナンスやカスタムが容易です。キャリヤ本体及びガイドレール本体には電子的なデバイスを内蔵しないため比較的悪条件の環境でも安定した運用が可能です。
急な移設や設備変更にも迅速に対応でき、消耗品であるワイヤーロープ(1年保証※)の交換も難しくありません。
ADVANTAGES
F C S 活用の優位性
チャッキングして搬送、受渡しが可能なため、搬送途中でのワークピースの衝突や詰まり、落下がなくなり、不良品の発生やチョコ停が解消されます。
3次元の軌道を一気に搬送。受け渡しミスや仕掛かり品の発生を防ぎ、ジャストインタイムでのシャトル搬送を実現。
条件により最大5m/秒の高速搬送が可能、厳しいサイクルタイム要件に応えます。
インバーター制御により速度調整、加減速調整が可能。スロースタート・スローストップにより滑らかに走行します。
コンパクトで柔軟な配置設計により、工場スペースを効率的に活用できます。
また従来の整列装置、昇降装置、姿勢変換装置なども削減できるため省コストに寄与します。
標準部品は常時在庫を確保しているため、短納期での導入が可能です。
消耗品の確保も安心です。
GALLERY
F C S 搬送実績紹介
※クリックで拡大表示します
MOVIE
製品動画紹介
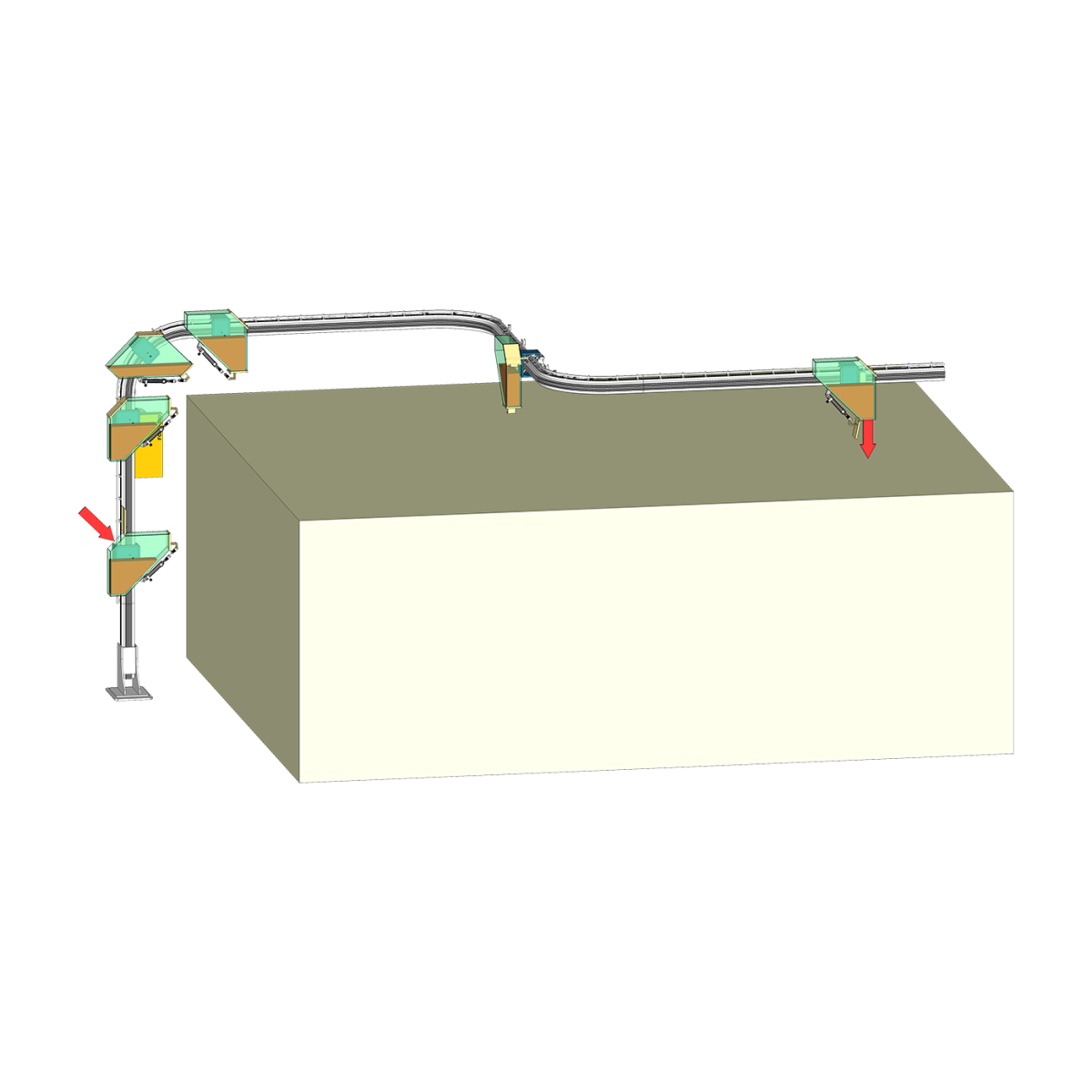
IMPLEMENTATION EXAMPLE
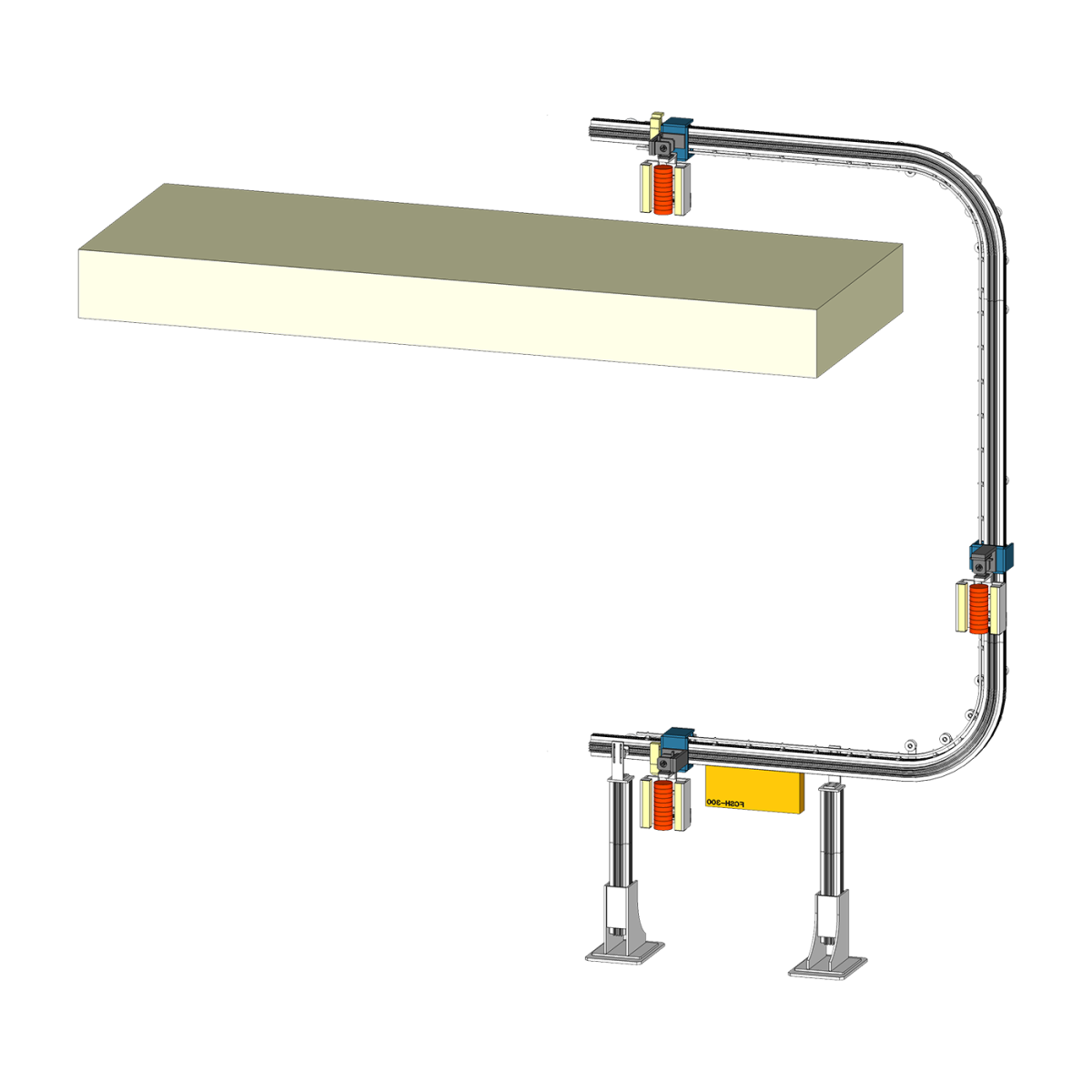
FCS-H300の適用例
SPECIFICATION
製品仕様